Solution Overview
The flight simulation semi-physical simulation platform is a modular, lightweight, highly immersive, and low-cost professional product launched by CnTech based on its own advantages in simulation technology and flight simulator research and development, combined with domestically developed real-time simulation software and hardware systems. It is based on user needs and provides users with a fast simulation verification research solution. The solution can realize the real-time operation of the user’s complex simulation model and quickly visualize the operation results on the flight simulator for action feedback. Users can conveniently and quickly modify and adjust the simulation model according to the feedback effect of the simulator until the feedback result of the platform meets the verification expectation. By constructing this complete control closed-loop simulation system, it provides support for the verification, design, development and verification of airborne equipment flight control algorithms, and meets the needs of aircraft research and flight training, multi-task joint flight training, etc.

System Composition
1. Flight Simulator:
The flight simulator part of the flight simulation semi-physical simulation platform includes simulation models such as cockpit environment, flight control, navigation, and visual scene system of various types of aircraft, and simulates the external environment connected with airborne equipment. Combined with the semi-physical simulation platform, it completes the connection and driving of the physical effect simulator. The platform can be equipped with a small six-degree-of-freedom motion platform and a lightweight cockpit, equipped with a high-simulation core control unit, and provides a realistic visual environment through the visual scene system to provide efficient semi-physical simulation and flight training scenarios for researchers in the fields of military aircraft, transport aviation, general aviation, eVTOL, and drones.
Types of flight simulators include:
- Large passenger aircraft flight simulator for transport aviation: CNFSimulator.A32 Airbus A320 flight simulator/CNFSimulator.C91 domestic large aircraft flight simulator. With a 1:1 simulated physical cockpit of the real machine, it can fully simulate normal and emergency operations of aircraft systems and support advanced flight management and avionics equipment simulation. The aerodynamic simulation and load system can accurately simulate the performance of turbojet subsonic aircraft and the manipulation characteristics of fly-by-wire aircraft to achieve high-precision flight simulation of civil airliners and professional flight training-normal procedure training, visual takeoff and landing routes, etc.

Airbus A320 flight simulator

COMAC C919 flight simulator
- General aviation flight simulator: CNFSimulator.FTD.C17/D40/D42 Cessna C172/Diamond DA40/Diamond DA42 flight simulator. It can simulate the G1000 integrated avionics system and fully simulate the functions and characteristics of the real machine avionics. The flight control and load system can accurately restore the manipulation characteristics and force feedback of traditional aircraft. It meets the CAAC FTD Level 5, FAA FTD Level 5 and EASA FNPT II standards and can be used for professional flight training.

Cessna C172 flight simulator

Diamond DA42 flight simulator

Diamond DA40 flight simulator
- CNFSimulator.AATD Advanced Aviation Training Device/CNFSimulator.BATD Basic Aviation Training Device. Single-seat small lightweight equipment can realize the arbitrary switching of multiple models of general aviation aircraft Cessna172, CessnaT182, Diamond DA40, and Diamond DA42, covering various models and various basic training at a lower cost. This type of product is derived from the CNFSimulator.eFly desktop basic aviation trainer, which is smaller in size and easy to operate. It can realize one-key on/off and can be used to build aviation basic training classrooms.

CNFSimulator.AATD/BATD

CNFSimulator.eFly
- Six-degree-of-freedom motion platform, which can carry various types of flight simulator cockpits mentioned above, provides users with dynamic sensations, simulates the rotational angular acceleration, linear overload and vibration sensation during flight, and multi-directional load changes during maneuvering flight. Paired with the visual scene system, it more realistically restores the physical feedback brought by manipulation.

6-DOF simulator
2. Real-time simulator
The real-time simulator runs the VxWorks real-time operating system, has powerful performance and rich interfaces, and is mainly aimed at teaching and scientific research applications in universities, with multiple models for customers to choose from. The Links-RT real-time simulation software package is a semi-physical simulation system software independently developed by Ling Si Chuang Qi Company, dedicated to providing users with fast prototype design and hardware-in-the-loop simulation solutions.
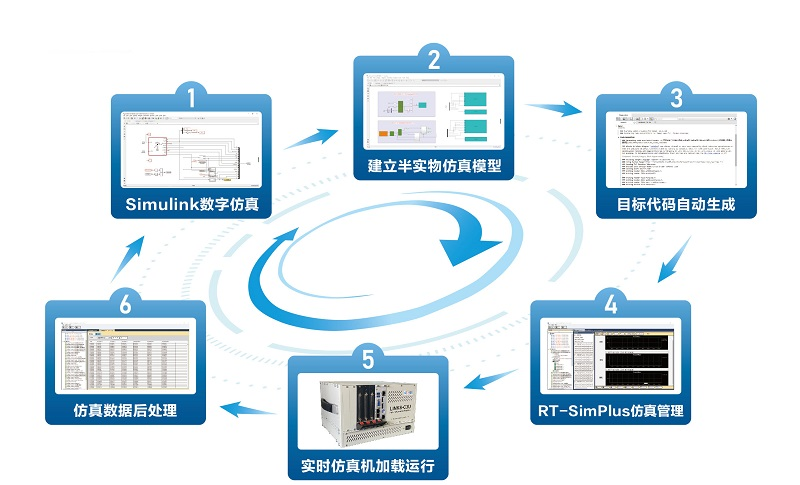
Development process
- Digital simulation: First, establish a mathematical model in the Simulink environment and verify the model and algorithm through mathematical simulation in Simulink;
- Semi-physical model preparation: Modify the digital simulation model, add hardware I/O modules, and establish a semi-physical simulation (HIL) model;
- Automatic generation of target code: After completing the parameter setting of the HIL model, you can call the automatic code generation tool to convert the Simulink model into C code and finally compile it into an executable program under the VxWorks system;
- Simulation configuration management: In the RT-Sim Plus master control software, follow the software wizard to establish a simulation project, set the simulation target machine attributes, configure monitoring and save variables, and prepare for real-time simulation;
- Real-time simulation: In the RT-Sim Plus software, click the [Start] button to start the simulation; The executable program generated by compiling the semi-physical model will be automatically downloaded to the target machine and start real-time operation. It interacts with physical equipment through IO hardware; The RT-Sim Plus software on the host computer monitors the status of the target machine through Ethernet and supports online modification of parameters, start-stop control, real-time data storage and other functions;
- Simulation data post-processing: After the simulation is over, RT-Sim Plus performs real-time storage data upload, format conversion (supporting txt, xls, mat and other formats), data playback, etc., can be seamlessly integrated with tools such as MATLAB and Excel, and can perform simple data processing.
Feature advantages
- Support RCP rapid prototype design: Automatically convert user’s MATLAB/Simulink simulation model to embedded control prototype;
- Support HIL hardware-in-the-loop testing: User’s physical equipment such as controllers can be directly connected to real-time simulators for dynamic verification of physical controller performance;
- Rich IO resources: A large number of lO board resources are available for users to choose from, including: DIO, AlO, PWM, CAN, RS232/422, 1553B, ARINC429 etc.;
- Multiple optional models: According to different application scenarios, there are embedded single-board equipment, PCI/CPCl/PX-le and other architectural equipment for selection.

Software features
- Support model-based system engineering (MBSE): Build a bridge between the physical world and the digital world through semi-physical simulation technology;
- One-click code automatic generation: support multiple embedded target platforms, such as: v×Works, RT-Linux, FPGA;
- Support FMI modeling specifications, support MATLAB, AMESim, MWorks, Simpack, Dymola and other multi-disciplinary and multi-domain simulation modeling software to build large and complex experimental scenarios;
- Strong openness: support C, C++, Python, LabVIEW and other languages for extended applications;
- Friendly human-computer interaction: full Chinese operation interface, rich instrument controls, and provide complete support documentation;
- Powerful computing power: support automatic decomposition of complex simulation model tasks, support CPU multi-core (up to 32 cores) task allocation and multi-machine distributed parallel computing to meet the real-time requirements of complex critical tasks.
Applicable fields of the solution
The flight simulation semi-physical simulation platform serves industries such as transport aviation, general aviation, eVTOL, and drones. It assists in the research and design of equipment, virtual testing and verification, shortens the research and development cycle, reduces research and development costs, and improves research and development efficiency. In addition to serving industrial scenarios, the platform is also widely used in engineering education and scientific research fields in universities to improve the engineering capabilities and innovation capabilities of students and teachers. It is a comprehensive experimental platform for self-control and aircraft-related disciplines (aircraft design, aircraft control, drones, etc.), covering the experimental content of multiple professional courses and applicable to experimental courses such as “Automatic Control Principles”, “Introduction to Aerospace”, “Flight Control Technology”, “Aerospace Dynamics”, “Aerospace Instrument Equipment”, etc.
Aircraft simulation driving experimental platform:
- Aviation cockpit instrument recognition;
- Aircraft control surface operation;
- Digital simulation modeling of aircraft based on MATLAB/Simulink;
- Real-time simulation of aircraft models;
- Real-time simulated driving flight (static);
- Real-time simulated driving flight (dynamic);
- Analysis of aircraft flight performance.
UAV flight control semi-physical experimental platform:
- Semi-physical simulation experiment (model building, code generation, project management, interface building, data processing, etc.);
- Flight simulation experiment (quadrotor, fixed-wing digital simulation, task planning, flight scene, etc.);
- Flight control code generation experiment (flight control correction, flight control model building, code generation, code download, etc.);
- Hardware-in-the-loop test experiment (flight control, sensors, simulators, turntable-in-the-loop test, etc.);
- Formation expansion experiment (multi-machine, multi-sensor test , centralized and distributed algorithm testing).
Rotorcraft (eVTOL) flight control experimental platform:
- Basic knowledge experiment of rotorcraft (structure and flight principle, coordinate system, sensor calibration, mathematical modeling, etc.);
- Automatic control experiment of rotorcraft (time domain analysis , frequency domain analysis , root locus , system correction , etc .);
- Rotorcraft flight simulation experiment (digital simulation , task planning , flight scene , etc .);
- Interface verification experiment of rotorcraft UAV (data acquisition , attitude monitoring , image recognition , data filtering , etc .);
- Rotorcraft flight control experiment (attitude control , task planning , visual servo control , etc .).